13 KiB
title: Homework 5 -- Optimization Methods author: Claudio Maggioni header-includes:
- \usepackage{amsmath}
- \usepackage{amssymb}
- \usepackage{hyperref}
- \usepackage[utf8]{inputenc}
- \usepackage[margin=2.5cm]{geometry}
- \usepackage[ruled,vlined]{algorithm2e}
- \usepackage{float}
- \floatplacement{figure}{H}
- \hypersetup{colorlinks=true,linkcolor=blue}
\maketitle
Excecise 1
Exercise 1.1
The Simplex method
The simplex method solves constrained minimization problems with a linear cost function and linearly-defined equality and inequality constraints. The main approach used by the simplex method is to consider only basic feasible points along the feasible region polytope and to iteratively navigate between them hopping through neighbours and trying to find the point that minimizes the cost function.
Although the Simplex method is relatively efficient for most in-practice
applications, it has exponential complexity, since it has been proven that
a carefully crafted $n$-dimensional problem can have up to 2^n polytope
vertices, thus making the method inefficient for complex problems.
Interior-point method
The interior point method aims to have a better worst-case complexity than the simplex method but still retain an in-practice acceptable performance. Instead of performing many inexpensive iterations walking along the polytope boundary, the interior point takes Newton-like steps travelling along "interior" points in the feasible region (hence the name of the method), thus reaching the constrained minimizer in fewer iterations. Additionally, the interior-point method is easier to be implemented in a parallelized fashion.
Penalty method
The penalty method allows for a linear constrained minimization problem with equality constraints to be converted in an unconstrained minimization problem, and to allow the use of conventional unconstrained minimization algorithms to solve the problem. Namely, the penalty method builds a new uncostrained objective function with is the summation of:
- The original objective function;
- An additional term for each constraint, which is positive when the current
point
xviolates that constraint and zero otherwise.
With some fine tuning of the coefficients for these new "penalty" terms, it is possible to build an equivalent unconstrained minimization problem whose minimizer is also constrained minimizer for the original problem.
Exercise 1.2
The simplex method, as said in the previous section, works by iterating along
basic feasible points and minimizing the cost function along them. In terms of
strict linear algebra terms, the simplex method works by finding an initial set
of indices \mathcal{B} which represent column indices of A. At each
iteration, the lagrangian inequality set of constraints s is computed and
checked for negative components, since in order to satisfy the KKT conditions
the components must be all \geq 0. The iteration consists of removing one of
said components by changing the \mathcal{B} index set, by effectively swapping
one of the basis vectors with one of the non-basic ones. The method terminates
once all components of s are non-negative.
Geometrically speaking the meaning of each iteration is a simple transition from
a basic feasible point to another neighboring one, and the search step is
effectively equivalent to one of the edges of the polytope. If the s component
is always chosen to be the smallest (i.e. we choose the "most negative"
component), then the method behaves effectively a gradient descent operation of
the cost function hopping between basic feasible points.
Exercise 1.3
In order to discuss in detail the interior point method, we first define two
sets named "feasible set" (\mathcal{F}) and "strictly feasible set"
(\mathcal{F}^{o}) respectively:
$$
\begin{array}{l} \mathcal{F}=\left{(x, \lambda, s) \mid A x=b, A^{T}
\lambda+s=c,(x, s) \geq 0\right} \ \mathcal{F}^{o}=\left{(x, \lambda, s) \mid
A x=b, A^{T} \lambda+s=c,(x, s)>0\right} \end{array}
A central path \mathcal{C} is defined as an arc strictly composed of feasible
points which is parametrized by a scalar \tau>0 where each point
\left(x_{\tau}, \lambda_{\tau}, s_{\tau}\right) \in \mathcal{C} satisfies the
following conditions:
$$
\begin{array}{c}
A^{T} \lambda+s=c \
A x=b \
x_{i} s_{i}=\tau \quad i=1,2, \ldots, n \
(x, s)>0
\end{array}
We can observe how these conditions are very much similar to the KKT conditions
and, in fact, they only differ by the factor \tau and by requiring the
pairwise products to be strictly greater than zero. With this, we can define the
central path as follows:
$$
\mathcal{C}=\left{\left(x_{\tau}, \lambda_{\tau}, s_{\tau}\right) \mid
\tau>0\right}
Given these definitions, we can also observe that, as \tau approaches zero,
the conditions we have defined become a closer and closer approximation to the
original KKT conditions. Therefore, if the central path \mathcal{C} converges
to anything as \tau approaches zero, then we know that it will converge to a
solution of the linear program. Meaning that the central path is leading us to a
solution by maintaining x and s positive while reducing the pairwise
products to zero at the same time. Usually, the Newton method is used to take
steps following \mathcal{C} rather than by following the set of feasible
points \mathcal{F} because it allows for longer steps before violating the
positivity constraint.
Exercise 2
Exercise 2.1
The resulting MATLAB plot of each constraint and of the feasible region is shown below:
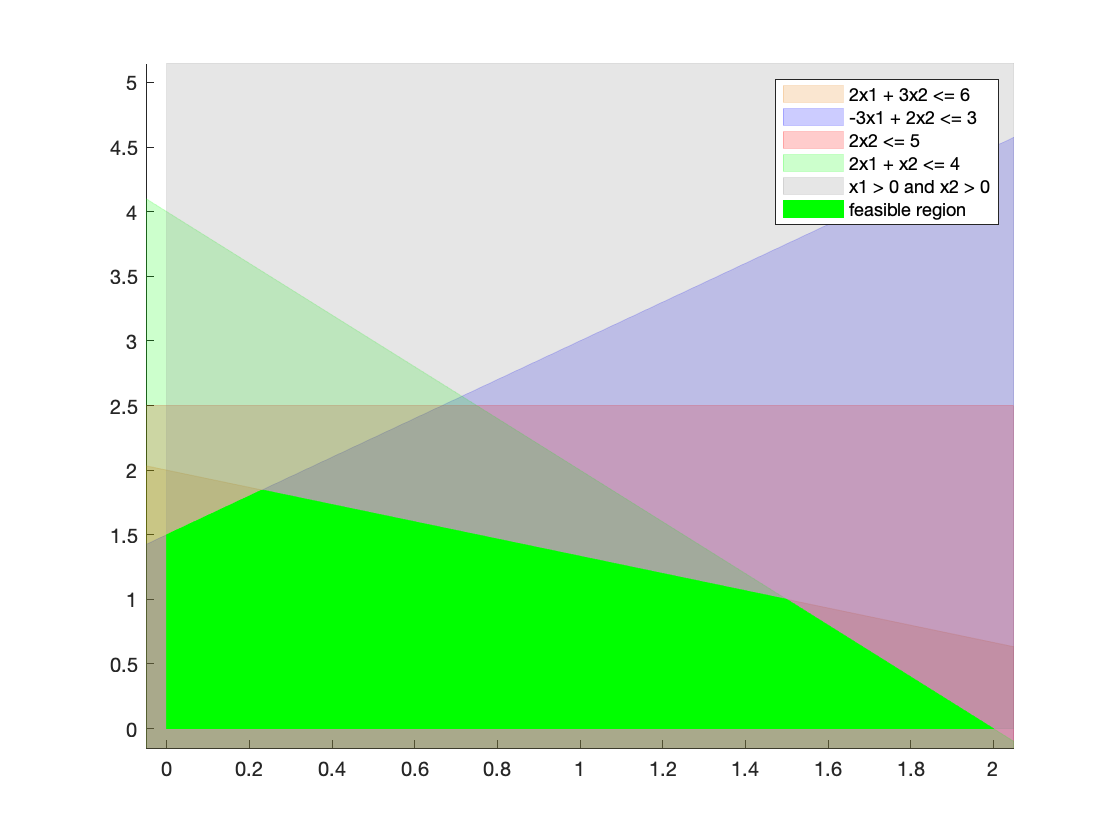
Exercise 2.2
According to Nocedal, a vector x is a basic feasible point if it is in the
feasible region and if there exists a subset \beta of the
index set 1, 2, \ldots, n such that:
\betacontains exactlymindices, wheremis the number of rows ofA;- For any
i \notin \beta,x_i = 0, meaning the boundx_i \geq 0can be inactive only ifi \in \beta; - The
mxmmatrixBdefined byB = [A_i]_{i \in \beta}(whereA_iis the i-th column of A) is non-singular, i.e. all columns corresponding to the indices in\betaare linearly independent from each other.
The geometric interpretation of basic feasible points is that all of them are vertices of the polytope that bounds the feasible region. We will use this proven property to manually solve the constrained minimization problem presented in this section by aiding us with the graphical plot of the feasible region in figure \ref{fig:a}.
Exercise 2.3
Since the geometrical interpretation of the definition of basic feasible point states that these point are non-other than the vertices of the feasible region, we first look at the plot above and to these points (i.e. the vertices of the bright green non-trasparent region). Then, we look which constraint boundaries cross these edges, and we formulate an algebraic expression to find these points. In clockwise order, we have:
- The lower-left point at the origin, given by the boundaries of the constraints
x_1 \geq 0andx_2 \geq 0:
$x^*_1 = \begin{bmatrix}0\\0\end{bmatrix- The top-left point, at the intersection of constraint boundaries
x_1 \geq 0and-3x_1 + 2x_2 \leq 3: $$x_1 = 0 ;;; 2x_2 = 3 \Leftrightarrow x_2 = \frac32 ;;; x^*_2 = \frac12 \cdot \begin{bmatrix}0\3\end{bmatrix} - The top-center-left point at the intersection of constraint boundaries $-3x_1 +
2x_2 \leq 3$ and
2x_1 + 3x_2 \leq 6: $$-3x_1 + 2x_2 + 3x_1 + \frac92 x_2 = \frac{13}{2} x_2 = 3 + 9 = 12 \Leftrightarrow x_2 = 12 \cdot \frac2{13} = \frac{24}{13}$$$$ -3x_1 + 2 \cdot \frac{24}{13} = 3 \Leftrightarrow x_1 = \frac{39 - 48}{13} \cdot \frac{1}{-3} = \frac{3}{13} ;;; x^*_3 = \frac{1}{13} \cdot \begin{bmatrix}3\24\end{bmatrix} - The top-center-right point at the intersection of constraint boundaries $2x_1
- 3x_2 \leq 6$ and
2x_1 + x_2 \leq 4: $$2x_1 + 3x_2 - 2x_1 - x_2 = 2x_2 = 6 - 4 = 2 \Leftrightarrow x_2 = 1 ;;; 2x_1 + 1 = 4 \Leftrightarrow x_1 = \frac32 ;;; x^*_4 = \frac12 \cdot \begin{bmatrix}3\2\end{bmatrix}
- 3x_2 \leq 6$ and
- The right point at the intersection of
2x_1 + x_2 \leq 4and $x_2 \geq 0$: $$x_2 = 0 ;;; 2x_1 + 0 = 4 \Leftrightarrow x_1 = 2 ;;; x^*_5 = \begin{bmatrix}2\0\end{bmatrix}
Therefore, x^*_1 to x^*_5 are all of the basic feasible points for this
constrained minimization problem.
We then compute the objective function value for each basic feasible point found, The smallest objective value will correspond with the constrained minimizer problem solution.
$$ x^_1 = \begin{bmatrix}0\0\end{bmatrix} ;;; f(x^_1) = 4 \cdot 0 + 3 \cdot 0 = 0$$$$ x^_2 = \frac12 \cdot \begin{bmatrix}0\3\end{bmatrix} ;;; f(x^_2) = 4 \cdot 0 + 3 \cdot \frac{3}{2} = \frac92$$$$ x^_3 = \frac{1}{13} \cdot \begin{bmatrix}3\24\end{bmatrix} ;;; f(x^_3) = 4 \cdot \frac{3}{13} + 3 \cdot \frac{24}{13} = \frac{84}{13}$$$$ x^_4 = \frac12 \cdot \begin{bmatrix}3\2\end{bmatrix} ;;; f(x^_4) = 4 \cdot \frac32 + 3 \cdot 1 = 9$$$$ x^_5 = \begin{bmatrix}2\0\end{bmatrix} ;;; f(x^_5) = 4 \cdot 2 + 1 \cdot 0 = 8$$
Therefore, x^* = x^*_1 = \begin{bmatrix}0 & 0\end{bmatrix}^T is the global
constrained minimizer.
Exercise 3
Exercise 3.1
Yes, the problem can be solved with Uzzawa's method since the problem can be reformulated as a saddle point system. The KKT conditions of the problem can be reformulated as a matrix-vector to vector equality in the following way:
$$\begin{bmatrix}G & -A^T\A & 0 \end{bmatrix} \begin{bmatrix} x^\\lambda^ \end{bmatrix} = \begin{bmatrix} -c\b \end{bmatrix}.$$
If we then express the minimizer x^* in terms of x, an approximation of it,
and p, a search step (i.e. x^* = x + p), we obtain the following system.
$$\begin{bmatrix}
G & A^T\
A & 0
\end{bmatrix}
\begin{bmatrix}
-p\
\lambda^*
\end{bmatrix} =
\begin{bmatrix}
g\
h
\end{bmatrix}
This is the system the Uzzawa method will solve. Therefore, we need to check if the matrix:
$$K = \begin{bmatrix}G & A^T \ A& 0\end{bmatrix} = \begin{bmatrix}
6 & 2 & 1 & 1 & 0 \
2 & 5 & 2 & 0 & 1 \
1 & 2 & 4 & 1 & 1 \
1 & 0 & 1 & 0 & 0 \
0 & 1 & 1 & 0 & 0 \
\end{bmatrix}\text{ recalling the computed values of }A\text{ and }G\text{ from the
previous assignment}
Has non-zero positive and negative eigenvalues. We compute the eigenvalues of this matrix with MATLAB, and we find:
$$\begin{bmatrix}
-0.4818\
-0.2685\
2.6378\
4.3462\
8.7663\end{bmatrix}
Therefore, the system is indeed a saddle point system and it can be solved with Uzzawa's method.
Exercise 3.2
The MATLAB code used to find the solution can be found under section 3.2 of the
main.m script. The solution is:
$$x=\begin{bmatrix}0.7692\-2.2308\2.2308\end{bmatrix} ;;; \lambda=
\begin{bmatrix}-10.3846\2.1538\end{bmatrix}